Egg-Bot: Unterschied zwischen den Versionen
Axl (Diskussion | Beiträge) (→cnc_path() & Egg-Bot Prototyp) |
Axl (Diskussion | Beiträge) (→Links & more infos) |
||
| (20 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
| − | [[Datei:Egg-Bot | + | [[Datei:Egg-Bot 027 Eggs IMG 1870.JPG|200px|right|thumb|Egg-Bot Tests]] |
= Egg-Bot - Easter Edition 2012 = | = Egg-Bot - Easter Edition 2012 = | ||
== Egg-Bot Ideen & Prototyp == | == Egg-Bot Ideen & Prototyp == | ||
| Zeile 5: | Zeile 5: | ||
* [http://youtu.be/GW3UNnLwwhg Video zu Tests mit ''Tesa''-PowrStrips bzw. doppelseitigen Teppich-Klebeband] | * [http://youtu.be/GW3UNnLwwhg Video zu Tests mit ''Tesa''-PowrStrips bzw. doppelseitigen Teppich-Klebeband] | ||
| − | = | + | = Egg-Bot Prototypen = |
| − | + | * Prototypen-Bau | |
| + | * Stepper: Typ Moons Hybride Bipolar Stepping Motor 14HY7002-06 1.8 Deg - [http://www.pollin.de/shop/dt/MzU1OTg2OTk-/Motoren/Schrittmotoren/Schrittmotor_MOONS_14HY7002_06.html z.B. bei Pollin] | ||
| + | {| class="wikitable" border="1" cellpadding="4" cellspacing="0" style="text-align:center; background:#f9f9f9; border-collapse:collapse;" | ||
| + | |+Moons Pinbelegung | ||
| + | !Pin !! Bedeutung !! Kabelfarbe | ||
| + | |- | ||
| + | || 1 || 1B || style="background:#090;color:#fff;"|grün | ||
| + | |- | ||
| + | || 3 || 1A || style="background:#000;color:#fff;"|schwarz | ||
| + | |- | ||
| + | || 4 || 2A || style="background:#009;color:#fff;"|blau | ||
| + | |- | ||
| + | || 6 || 2B || style="background:#900;color:#fff;"|rot | ||
| + | |} | ||
| − | <gallery caption="Eggbot | + | |
| − | Datei:Eggbot prototyp-2012-01-29 (2)-1280.jpg|Prototyp - Stepper | + | <gallery caption="Eggbot Prototypen" perrow=5> |
| + | Datei:Eggbot prototyp-2012-01-29 (2)-1280.jpg|Prototyp #1 - Stepper | ||
Datei:Eggbot prototyp-2012-01-29 (5)-1280.jpg|Egg-Bot Prototypes | Datei:Eggbot prototyp-2012-01-29 (5)-1280.jpg|Egg-Bot Prototypes | ||
Datei:Egg-Bot 010 Proto IMG 1698-1280.jpg|Egg-Bot Prototypes | Datei:Egg-Bot 010 Proto IMG 1698-1280.jpg|Egg-Bot Prototypes | ||
Datei:Egg-Bot 010 Proto IMG 1695-1280.jpg|Egg-Bot Prototypes | Datei:Egg-Bot 010 Proto IMG 1695-1280.jpg|Egg-Bot Prototypes | ||
Datei:Foto2072.jpg|Milling... | Datei:Foto2072.jpg|Milling... | ||
| + | Datei:IMG 1732.JPG|Stepper-Test | ||
| + | Datei:IMG 1735.JPG|Stepper-Pin-Belegung | ||
| + | Datei:IMG 1736.JPG|Prototyp #2 | ||
| + | Datei:IMG 1739.JPG|Prototyp #2 | ||
| + | Datei:IMG 1738.JPG|Prototyp #2 | ||
| + | Datei:Egg-Bot 019 IMG 1755.JPG|Motor und Gegenlager | ||
| + | Datei:Egg-Bot 019 IMG 1757.JPG|Ei-Halter Gegenlager | ||
| + | Datei:Egg-Bot 019 IMG 1761.JPG|Prototpy Playground | ||
</gallery> | </gallery> | ||
| + | <br/> | ||
| + | |||
| + | == Egg-Bot Prototyp EB#2 == | ||
| + | * Arduino-Control mit [http://www.contraptor.org/arduino-gcode-interpreter g-Code Interpreter] | ||
| + | ** X-Achse: 36 mm == 360° == 1 Umdrehung - Stepper "MOONS", NEMA 14 (400 mA) | ||
| + | ** Y-Achse: 12 mm == 120° Winkel des Arms - Stepper von Waterod, NEMA 14 | ||
| + | * Toolchain: InkScape (36 x 12 mm] --> pyCAM --> Processing ''sertalk'' Kommunikation mit COMxx | ||
| + | |||
| + | <gallery caption="Eggbot Prototyp EB#2" perrow=5> | ||
| + | Datei:Egg-Bot 020 Proto IMG 1790.JPG|EB#2 Setup | ||
| + | Datei:Egg-Bot 020 Proto IMG 1791.JPG|EB#2 tut was | ||
| + | Datei:Egg-Bot 020 Proto IMG 1796.JPG|EB#2 tut was | ||
| + | Datei:Egg-Bot 020 Proto IMG 1788.JPG|Gib mit ein E | ||
| + | Datei:Egg-bot sign IMG 1794.JPG|Egg-Bot Schild | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | === 3.3.2012 === | ||
| + | * Stärkerer Stepper NEMA 14, um die Kräfte am Arm besser auszugleichen | ||
| + | * Parallelführung am Arm Verbesserung der Zeichen-Genauigkeit | ||
| + | |||
| + | <gallery perrow=5> | ||
| + | Datei:Egg-Bot 022 EB2 IMG 1817.JPG|Genauigkeit steigt | ||
| + | Datei:Egg-Bot 022 EB2 IMG 1818.JPG|Ein neuer Arm | ||
| + | Datei:Egg-Bot 022 EB2 IMG 1837.JPG|Stärkerer Stepper für ... | ||
| + | Datei:Egg-Bot 023 IMG 1834.JPG|... neuen Arm mit ... | ||
| + | Datei:Egg-Bot 023 IMG 1841.JPG|Parallel-Führung | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | === 7.3.2012 === | ||
| + | * Arm-Prototyp durch Eigenkonstruktion mit [[Zen_Toolworks_CNC_Fräse#T8L_.E2.80.93_bone_vertex|T8L bone vertexes]] ersetzt | ||
| + | * Test mit Gegengewicht - Danke für den Tipp, [[Benutzer:Yag-freak|Yag-freak]] | ||
| + | |||
| + | <gallery perrow=5> | ||
| + | Datei:Egg-Bot 023 IMG 1844.JPG|Parallel-Führung | ||
| + | Datei:Egg-Bot 024 2012-03-07 21.46.58.jpg|EB#2 Tests | ||
| + | Datei:Egg-Bot 024 2012-03-07 22.43.26.jpg|EB#2 Gegengewicht | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | === 10.3.2012 === | ||
| + | * Arm: Abstände in Parallel-Führung vergrößert für mehr Präzision | ||
| + | * [[Zen_Toolworks_CNC_Fräse#T8L_.E2.80.93_bone_vertex|T88L-Vertex]] für Servo gefräst und eingesetzt | ||
| + | * Servo zum Anheben des Stiftes montiert | ||
| + | * Software angepaßt: g-Codes mit Z-Koordinaten > 0 heben Stift an. Z <= 0 senkt Stift ab. | ||
| + | * Stabileres Gegengewicht | ||
| + | |||
| + | <gallery perrow=5> | ||
| + | Datei:Egg-Bot 025 IMG 1850.JPG|Neue Parallel-Führung | ||
| + | Datei:Egg-Bot 025 IMG 1854.JPG|Servo für Z-Achse | ||
| + | Datei:Egg-Bot 025 IMG 1855.JPG|Servo & T88L | ||
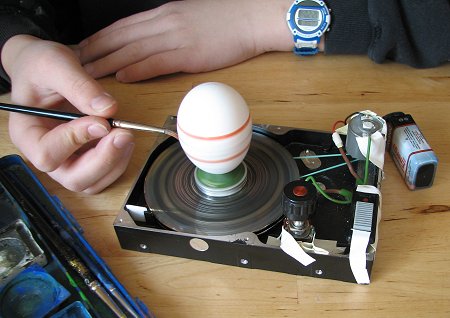
| + | Datei:Egg-Bot 025 IMG 1857.JPG|Bot-Ei :-) | ||
| + | </gallery> | ||
| + | <br><br> | ||
| + | === 17.3.2012 === | ||
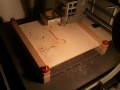
| + | * [[Zen_Toolworks_CNC_Fr%C3%A4se#Egg-Bot_Y-Motor_plate|Egg-Bot Y-Motor plate]] | ||
| + | * Ersatz für ein Fischertechnik© Teil im Prototyp | ||
| + | * 9 mm [http://de.wikipedia.org/wiki/Multiplex-Platte Multiplex Sperrholz] | ||
| + | * Aufnahme für NEMA 14 Stepper mit versenktem Lagerblock und 12 mm Langlöchern | ||
| + | * Schlitze zur Führung auf dem Egg-Bot Rahmen | ||
| + | |||
| + | <gallery caption="Egg-Bot Y-Motor plate" perrow=5> | ||
| + | Datei:Egg-Bot 026 Y-Motor Plate IMG 1865.JPG|Versenkter Lagerblock | ||
| + | Datei:Egg-Bot_026_Y-Motor_Plate_IMG_1866.JPG|Langlöcher | ||
| + | Datei:Egg-Bot 026 Y-Motor Plate IMG 1867.JPG|Kabelschellen Montage | ||
| + | Datei:Egg-Bot 025 Counter-weight IMG 1868.JPG|Arm Gegengewicht | ||
| + | </gallery> | ||
| + | <br><br> | ||
| + | |||
| + | |||
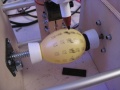
| + | === 22.3.2012 === | ||
| + | * Ein neuer Arm - näher am Egg-Bot Original | ||
| + | ** der Arm mit Parallel-Führung schwingt start, vermutlich zu hohes Eigengewicht | ||
| + | * Gelenk über Folie | ||
| + | ** bisher ohne Servo | ||
| + | |||
| + | <gallery caption="Arm" perrow=5> | ||
| + | Datei:Egg-Bot 030 new arm IMG 1872.JPG|Neuer Arm | ||
| + | Datei:Egg-Bot 030 new arm IMG 1873.JPG|Neuer Arm | ||
| + | Datei:Egg-Bot 030 new arm IMG 1874.JPG|Neuer Arm | ||
| + | </gallery> | ||
| + | <br><br> | ||
| + | |||
| + | |||
| + | === 26.3.2012 === | ||
| + | * Ein weiterer Arm (2B) - verbesserte Stift-Aufnahme | ||
| + | ** M4 Vierkant-Mutter und Spannschraube fixieren Stift | ||
| + | ** Stiftführung als Prisma mit 60° Winkel, für runde und sechseckige Stifte zentrierend | ||
| + | ** bisher ohne Servo | ||
| + | * Bewegliches Teil mit 2 mm Gummi - Tests sind nicht vielversprechend | ||
| + | |||
| + | <gallery perrow=5> | ||
| + | Datei:Egg-Bot 031 new arm 2B IMG 1886.JPG|Stifthalterung 6-Eck | ||
| + | Datei:Egg-Bot 031 new arm 2B IMG 1887.JPG|Arm 2B montiert | ||
| + | Datei:Egg-Bot 031 new arm 2B IMG 1890.JPG|Stift rund | ||
| + | </gallery> | ||
| + | <br><br> | ||
| + | |||
| + | |||
| + | === 31.3.2012 === | ||
| + | * Arm (2B) - nun 20 mm breit | ||
| + | ** Kunststoff-Folie aus Schnellhefter als Scharnier | ||
| + | ** '''mit''' Servo | ||
| + | ** Genauigkeit der Y-Achse verbessert | ||
| + | <gallery perrow=5> | ||
| + | Datei:Egg-Bot 031 new arm 2B IMG 1896.JPG|Arm mit Stift und Servo | ||
| + | </gallery> | ||
| + | <br><br> | ||
| + | |||
| + | === 2.4.2012 === | ||
| + | * Test-Pattern - Tests für Wiederhol-Genauigkeit | ||
| + | |||
| + | <gallery perrow=5> | ||
| + | Datei:Egg-Bot 032 Test-Pattern IMG 1901.JPG|Quadrate | ||
| + | </gallery> | ||
| + | <br><br> | ||
= Links & more infos = | = Links & more infos = | ||
| + | '''Original Egg-Bot und Varianten''' | ||
| + | * [http://wiki.evilmadscience.com/The_Original_Egg-Bot_Kit The Original Egg-Bot kit from Evil Mad Science] | ||
* [http://www.thingiverse.com/thing:16674 3D printed Egg-Bot] | * [http://www.thingiverse.com/thing:16674 3D printed Egg-Bot] | ||
| + | |||
| + | * http://www.vienna-color.com/index-Dateien/Bilder/Ostern/malma.JPG | ||
| + | * http://produkte.schlecker.com/brauns-heitmann-ostereier-anmal-geraet-927235001 | ||
| + | * http://www.auvito.de/eier-malmaschine-aus-holz/artnr13775881/details.html | ||
| + | * http://www.vienna-color.com/index-Dateien/Bilder/Ostern/Bfix.JPG | ||
| + | * http://www.b-kainka.de/bast127.jpg | ||
| + | * http://www.flickr.com/photos/38027676@N04/with/3496234785/ | ||
| + | * http://www.regio-tv.de/video/130141.html | ||
| + | |||
| + | '''Stifte - lebensmittelecht''' | ||
| + | * '''Edding 1350 Egg Color Pen''' - Fasermaler Lebensmittelfarbe [http://www.office-profishop.com/product_info.php?info=p10691_edding-1350-egg-color-pen---Fasermaler-Lebensmittelfarbe----6er-Set-001-005--007---4-1350999-REPO.html z.B. bei office-profishop] (Auslauf-Modell) | ||
| + | * http://www.edumero.de/ostereier-filzstifte.html | ||
| + | * http://www.vienna-color.com/index-Dateien/Bilder/Ostern/stifte.JPG | ||
| + | * http://www.ks-versand.de/pi32/pd146.html | ||
| + | |||
| + | '''Anderes''' | ||
| + | * [http://www.makerbot.com/blog/2012/03/05/an-argyle-egg/ An argyle Egg] - Egg-Bot goes Karomuster | ||
| + | * [http://www.amazon.de/dp/B0014DMEI8/ref=pe_64611_29384591_pe_vfe_dt1 Brauns-Heitmann 60067 - Eiermalmaschine Mal mit mir] - Kommerzieller, aber manueller Egg-Bot | ||
| + | * [http://www.instructables.com/id/Mug-Plotter/ Mug-Plutter] spezialisiert auf Tassen | ||
[[Kategorie:Projekte]] | [[Kategorie:Projekte]] | ||
Aktuelle Version vom 17. März 2013, 10:12 Uhr

Inhaltsverzeichnis
Egg-Bot - Easter Edition 2012
Egg-Bot Ideen & Prototyp

Egg-Bot Prototypen
- Prototypen-Bau
- Stepper: Typ Moons Hybride Bipolar Stepping Motor 14HY7002-06 1.8 Deg - z.B. bei Pollin
| Pin | Bedeutung | Kabelfarbe |
|---|---|---|
| 1 | 1B | grün |
| 3 | 1A | schwarz |
| 4 | 2A | blau |
| 6 | 2B | rot |
- Eggbot Prototypen

Prototyp #1 - Stepper

Egg-Bot Prototypes

Egg-Bot Prototypes

Egg-Bot Prototypes
Milling...

Stepper-Test

Stepper-Pin-Belegung

Prototyp #2

Prototyp #2

Prototyp #2

Motor und Gegenlager

Ei-Halter Gegenlager

Prototpy Playground
-1280.jpg)
-1280.jpg)











Egg-Bot Prototyp EB#2
- Arduino-Control mit g-Code Interpreter
- X-Achse: 36 mm == 360° == 1 Umdrehung - Stepper "MOONS", NEMA 14 (400 mA)
- Y-Achse: 12 mm == 120° Winkel des Arms - Stepper von Waterod, NEMA 14
- Toolchain: InkScape (36 x 12 mm] --> pyCAM --> Processing sertalk Kommunikation mit COMxx
- Eggbot Prototyp EB#2

EB#2 Setup

EB#2 tut was

EB#2 tut was

Gib mit ein E

Egg-Bot Schild





3.3.2012
- Stärkerer Stepper NEMA 14, um die Kräfte am Arm besser auszugleichen
- Parallelführung am Arm Verbesserung der Zeichen-Genauigkeit

Genauigkeit steigt

Ein neuer Arm

Stärkerer Stepper für ...

... neuen Arm mit ...

Parallel-Führung





7.3.2012
- Arm-Prototyp durch Eigenkonstruktion mit T8L bone vertexes ersetzt
- Test mit Gegengewicht - Danke für den Tipp, Yag-freak

Parallel-Führung

EB#2 Tests

EB#2 Gegengewicht



10.3.2012
- Arm: Abstände in Parallel-Führung vergrößert für mehr Präzision
- T88L-Vertex für Servo gefräst und eingesetzt
- Servo zum Anheben des Stiftes montiert
- Software angepaßt: g-Codes mit Z-Koordinaten > 0 heben Stift an. Z <= 0 senkt Stift ab.
- Stabileres Gegengewicht

Neue Parallel-Führung

Servo für Z-Achse

Servo & T88L

Bot-Ei :-)




17.3.2012
- Egg-Bot Y-Motor plate
- Ersatz für ein Fischertechnik© Teil im Prototyp
- 9 mm Multiplex Sperrholz
- Aufnahme für NEMA 14 Stepper mit versenktem Lagerblock und 12 mm Langlöchern
- Schlitze zur Führung auf dem Egg-Bot Rahmen
- Egg-Bot Y-Motor plate

Versenkter Lagerblock

Langlöcher

Kabelschellen Montage

Arm Gegengewicht




22.3.2012
- Ein neuer Arm - näher am Egg-Bot Original
- der Arm mit Parallel-Führung schwingt start, vermutlich zu hohes Eigengewicht
- Gelenk über Folie
- bisher ohne Servo
- Arm

Neuer Arm

Neuer Arm

Neuer Arm



26.3.2012
- Ein weiterer Arm (2B) - verbesserte Stift-Aufnahme
- M4 Vierkant-Mutter und Spannschraube fixieren Stift
- Stiftführung als Prisma mit 60° Winkel, für runde und sechseckige Stifte zentrierend
- bisher ohne Servo
- Bewegliches Teil mit 2 mm Gummi - Tests sind nicht vielversprechend

Stifthalterung 6-Eck

Arm 2B montiert

Stift rund



31.3.2012
- Arm (2B) - nun 20 mm breit
- Kunststoff-Folie aus Schnellhefter als Scharnier
- mit Servo
- Genauigkeit der Y-Achse verbessert

Arm mit Stift und Servo

2.4.2012
- Test-Pattern - Tests für Wiederhol-Genauigkeit
Quadrate

Links & more infos
Original Egg-Bot und Varianten
- http://www.vienna-color.com/index-Dateien/Bilder/Ostern/malma.JPG
- http://produkte.schlecker.com/brauns-heitmann-ostereier-anmal-geraet-927235001
- http://www.auvito.de/eier-malmaschine-aus-holz/artnr13775881/details.html
- http://www.vienna-color.com/index-Dateien/Bilder/Ostern/Bfix.JPG
- http://www.b-kainka.de/bast127.jpg
- http://www.flickr.com/photos/38027676@N04/with/3496234785/
- http://www.regio-tv.de/video/130141.html
{kind=link}
{kind=link}
{kind=link}
Stifte - lebensmittelecht
- Edding 1350 Egg Color Pen - Fasermaler Lebensmittelfarbe z.B. bei office-profishop (Auslauf-Modell)
- http://www.edumero.de/ostereier-filzstifte.html
- http://www.vienna-color.com/index-Dateien/Bilder/Ostern/stifte.JPG
- http://www.ks-versand.de/pi32/pd146.html
{kind=link}
Anderes
- An argyle Egg - Egg-Bot goes Karomuster
- Brauns-Heitmann 60067 - Eiermalmaschine Mal mit mir - Kommerzieller, aber manueller Egg-Bot
- Mug-Plutter spezialisiert auf Tassen