Spider UFO
Aus Hackerspace Ffm
Version vom 19. Februar 2017, 15:54 Uhr von Axl (Diskussion | Beiträge)
Inhaltsverzeichnis
[Verbergen]Physical setup & coordinate system
Node 3 --------------------- 0 --------------------- Node 2
| | |
| |
frame_dy | |
| |
| | |
0 - - - - - - - - - - - - * 0/0/0 - - - - - - - - - 0
| | |
| |
frame_dy | |
| |
| | |
Node 0 ----- frame_dx ------ 0 ----- frame_dx ------ Node 1
// frame dimensions, x and y are doubled, 0 is the frame center // z represents the height, positive up. 0 is x/y plane
Simulation
with Processing 3.xx
Screenshot:

Movie: Datei:Spider UFO.wmv
Versuchsaufbau aus Fischer Technik
2017-01-14 - 2017-01-22

Aufbau 1
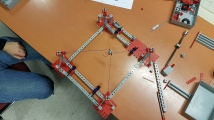
Top
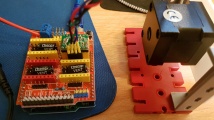
Arduino Uno CNC Shield für 4 Pololu's
Stepper-Platte für Fischertechnik

Einbau Stepper





🎥 Testlauf Datei:20170122 171617.mp4
CNC Shield
Um neben X, Y und Z auch den A Stepper unabhängig anzusteuern müssen 2 Jumper auf dem CNC Shield gesetzt werden:
- D12 --> A Step
- D13 --> A Dir
siehe im Bild, links über der Stromversorgung: 
Versuchsaufbau mit echten Größenverhältnissen
2017-02-18

- Arbeitsraum ca. 4 x 6 x 2 m³
- Verbindung zu den vier Ecken über RS485
- 3D-gedruckte Aufwicklung, Durchmesser 30mm
- 1 mm Stahlseil
- 5A Stepper Treiber für NEMA 17
- Datenübertragung per RS-485 über CAT5 Kabel

Aufwicklung

Setup
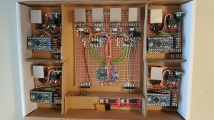
Module für die Datenübertragung

Stepper-Treiber für NEMA 17

UFO Dummy




