Elektronisches Saiteninstrument 1.0
Elektronisches Saiteninstrument 1.0 von Peter Wießenthaner
Allgemeines
Elektronisches Saiteninstrument ist in der 1.0-Version fertiggestellt. Die 5 Motoren werden mit einem Teensy 3.6 gesteuert. Die Bibliothek PJRC sorgt dafür, dass die PWM-Steuerung hinsichtlich der Beschleunigung und Verlangsamung der Motoren hervorragend ist. Die Treiber der Motore können in den Strompegeln präzis eingestellt werden. Die Schaltung für die Motorsteuerung ist vereinfacht: Es werden alle 5 Motoren von 1 Teensy 3.6 gesteuert und von den gleichen Treibern versorgt, statt einen Motor mit eine Arduino Nano zu steuern. Dies erleichterte die anstehenden Programmierungen erheblich. Die Bibliothek von PJRC ermöglicht extrem langsame und extrem schnelle Fahrten. Die langsamen Fahrten können präzise Intervalle von 1/3-Hertz realisieren. Die beiden Tonabnehmer rechts und links von der Saite führen zu Programmierungen / Kompositionen, die unterschiedliche Obertonkurven über die Lautsprecher darstellen können. Desweiteren erlauben die schnellen Bewegungen der Motore die Programmierung von sehr rhythmischen Mustern.
Die Schaltung für die Pickup's ist an den Vorstellungen von Dipl.-Ing. der Elektronik, Ulf Schaedla orientiert und installiert. Die Elektronik der Pickups wurde in Zusammenarbeit mit Thomas Perizonius hergestellt. Grundlage dafür ist die Machbarkeitsstudie von Herrn Schaedla. Nach vielen Versuchen mit verschiedenen Tonabnehmerversionen wurde ein Tonabnehmer mit 3000 Windungen hergestellt. Thomas Perizonius wickelte die Tonabnehmer und stellte die elektronischen Schaltkreise her. Der endgültige Tonabnehmer hat jetzt 3000 Windungen und überträgt den Ton weit in die oberen Frequenzen. Die dazugehörige Schaltung liefert die Voraussetzung.
Technisches in Stichworten
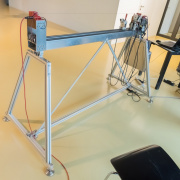
Länge ca. 2 Meter; 5 unabhängig voneinander betriebenen Motoren mit Teensy 3.6 gesteuert; rechts und links je ein Pickup mit Impedanzwandler und Verstärker - Eigenentwicklung; Stromversorgung von 2 x 48 V bei 4,2A; speziell entwickeltes Gestell - rutschfest und extrem längsstabil, da sehr schnell fahrende Slider; hängende Kabel für die Stromversogung der Motore - extrem leise; Zahnraeder und Teile für die Motorhalterung auf den Slidern selbst entwickelt und im 3D-Druck realisiert; spezieller Saitenteiler und Plektrum, Eigenentwicklung, Umlenkrolle und Spannvorrichtung an Igus-Gleitschiene angepaßt; Speziell für diese Länge gerechnete Stahlsaite und Wirbel aus dem Klavierbau, befestigt auf mexikanischem Hartholz, Saite mit einer Grundfrequenz von 85 Hz, bei optimaler Harmonizität - das bedeutet, dass die Saite beim Ausschwingen extrem die Tonhöhe hält.
Technische Einzelheiten für die Motorsteuerung
Frequenz / Weg / PWM Steuerdaten: die quadratische Gleichung für das Verhältnis von Weg zu Frequenz ist ermittelt. Nun werden diese Werte in Beziehung gesetzt zu den PWM-Steuerdaten für die Motore des Instrumentes. Ausgangspunkt: 1 Umdrehung der Achse = 200 Schritte. 200 Schritte werden wiederum unterteilt in 3200 Mikroschritte (spr = 200 * 16). Die Mikroschritte werden über Werte von: 1 steps/s bis 300.000 steps/s für Motor speed und 0 - 500.000 steeps/s^2 für Acceleration. Der Teensy 3.6 kann bis zu 4 Gruppen von 1 bis10 Motore gleichzeitig asyncron steuern oder 3 Motore synchron mit einer Stepper Puls Frequenz von 100kHz. Nach 1 Millisek. werden die Steuersignale refreshed. Für die Steuerung der Motore bedeutet das: Sehr feine Einstell-Varianten für Acceleration/Geschwindigkeit, mit der Möglichkeit für sehr hohes Tempo der Motore oder extrem langsames Tempo. Durch die hohen Zahlenwerte ist die Programmierung etwas umständlich. Sie erfordert verschiedenartige Angleichungen.
Die nächsten Schritte
Installation eines Teensy 3.2 mit Audio-Shield. Dieses Shield analysiert die aktuellen Tonhöhen in Echtzeit und erlaubt aufgrund dieser Daten eine weitere Schritte des Instrumentes. Installation von Sensoren für eine Gestensteuerung des Instrumentes. Endschalter für die Motore. Verbesserung der Verstärker der Pickup's.
Erste öffentliche Vorstellung, "night of sience" in der Universität der Stadt Frankfurt
Das Instrument wurde erstmals in der "night of sience" der Universität Frankfurt, am 14. Juni 2019 der Öffentlichkeit vorgestellt. Eine erfolgreiche Uraufführung meines neuen elektronischen Instruments mit verschiedenen Programmierungen / Kompositionen. Ich führte viele Gespräche mit Interessierten, sei waren beeindruckt von den vielfältigen Möglichkeiten des Instruments.
Mein Dank gilt allen vom Hackerspace, die mich bei der Herstellung dieses komplexen Instrumentes unterstützt haben.
2019, night of sience, Uni-Frankfurt

Detail des Instrumentes mit Saitenteiler und Plektrum

Elektronik
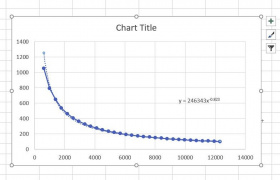
Gleichung Weg / Frequenz



