Das Projekt
Ziel des Projekts ist die Erzeugung von physischen Bitmap-Bildern mit Airsoft pellets.
Die Pellets kommen in verschiedenen Farben und sollen entsprechend der Bildvorlage in einen vertikalen Bilderrahmen einsortiert werden.
Artefakte
Das Projekt entsteht aus einer Reihe von Hard- und Software-Artefakten, die später zu den individuellen Maschinen zusammengeführt werden:
- Hardware
- Aufbewahrung der Pellets
- Vereinzelung der Pellets
- Transport der Pellets
- Farberkennung, Sortierung und Verteilung der Pellets
- Positionierung der Pellets und Aufbau als vertikales Bild
- Software
- Erzeugung des Motivs
- Farberkennung und Quantifizierung
- Steuerung der Maschine
Transport
Optischer Trigger
Der Sensor soll ein Pellet im Plexiglas-Rohr erkennen. Er besteht aus einer aufgesägten Gabellichtschranke mit roter LED.

Lichtschranke

Lichtschranke

Lichtschranke

Abschirmung gegen Umgebungslicht

Version 2 ...

... mit Infrarot-LED ...

... im Test







Vereinzelung
Aus einer Reihe vor Pellets gleicher Farbe soll genau ein Pellet entnommen werden. Da diese Funktion oft gebraucht wird soll der Aufbau sehr einfach sein und nur eine Bewegung per Servo ausgeführt werden.



Farberkennung
Die Farbe eines Pellets soll schnell und eindeutig erkannt werden.
Farbsensor Eigenbau
Der Sensor besteht aus einer 5 mm RGB LED und einem Fototransistor mit Verstärkerschaltung. LED und Transistor sind in einem Winkel von 45° angeordnet, der sich bei Tests als günstig erwiesen hat und wenig störende Reflektionen und Umgebungslicht einfängt.

Pellets in Grundfarben

RGB-LED und Fototransistor


Farbsensor von Watterott
- Farbsensor Module - ColorSense Module - Tests stehen aus
- Arduino Sample




Sortierung
Testaufbau: Die Sortierung erfolgt mit Hilfe von zwei Kreisscheiben, die von Servomotoren bewegt werden. In beiden Scheiben ist ein 7 mm Loch für ein Pellet. Sind beide Löcher an der gleichen Position, wird das Pellet ausgeworfen. Sind die Löcher nicht deckungsgleich, kann das Pellet durch synchrone Bewegung der Servos an eine Position bewegt werden.
Im aktuellen Setup ist damit steuerbar:
- Holen eines Pellets aus einen zuführenden Röhrchen
- Erfassung der Farbe mit einem Farbsensor
- Auswurf des Pellets in eines von sechs Fächern

Test-Rack

Servos und Scheiben

Zuführung und Farbsensor

Zuschnitt von Winkeln für Separatorfächer

Separatorfächer

Separatorfächer

Sortierung Tests

Achtfach-Sorter ...

... mit Servos









Farberkennung per Software
Die eigentliche Erkennung der Farbe erfolgt analog zur Farberkennung in der Wikipedia per Quantifizierung. Die drei Messwerte für rot, grün und blau werden dabei als dreidimensionale Koordinaten X, Y und Z im RGB-Raum interpretiert. Es wird eine Reihe von Messwerten aufgenommen und nach dem Muster "wenn dominante Farbe rot dann klassifiziere Pellet rot" verarbeitet.
Der Mittelwert aller Messwerte zu einer erkannten Farbe ergibt einen Markerpunkt. Spätere Messwerte ermitteln mit Hilfe der Euklidischen Distanz den nächstgelegenen Markerpunkt und ordnen damit das Pellet einer Farbe zu.
Zur Visualisierung der Messwerte in RGB-Raum wird aus Processing eine Datei im OpenSCAD Format erzeugt: Datei:3D diagram example colors.scad (für Wiedergabe der Farbe nur Preview Rendering / 'F5')
Visualisierung von Farbmesswerten in Processing
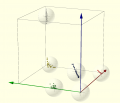
Visualisierung von Farbmesswerten in OpenSCAD


Aufbewahrung
Die Pellets werden in Platikflaschen nach Farben sortiert aufbewahrt. Die Pellets können mittels eines drehbaren Stabes durch eine Öffnung im Boden aus der Flasche gefördert werden.
- Prototyp

Rack aus Alu-Elementen

Flaschen

Stab

Getriebemotor am Stab




Aufbau als vertikales Bild
Test
Zwei Plexiglas Platten im Abstand von gut 6 mm, mit vertikalen Kanälen aus Nylonschnur als 'Spacer'. Für den Spacer sind 1,5 mm Durchmesser rechnerisch optimal.
- Prototyp

Berechnung Spacer
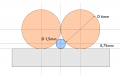
Visualisierung Spacer

Testaufbau

Testaufbau mit 10 Pellets je Kanal




Software Repository

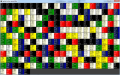
unter anderem mit Processing Code zur Umwandlung von Bitmap-Bildern in den Farbraum der Pellets:
- Beispielbilder

Original (48x48 Pixel)

48x48 Farb-Pellets

48x48 schwarz/grau/weiß


