Features
Features implementiert
- Live-Video-Streaming
- Multitouch Webinterface
Features in Entwicklung
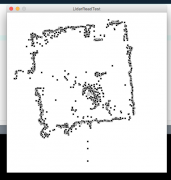
- 360 Grad LIDAR (Lidar light v1) Platform. Bis zu 100 Messungen pro Sekunde müssten möglich sein.
Features in Planung
- Indoor GPS mit Ultraschall
- Webinterface schöner machen
- Weitere Steuerungselemente für Webinterface
- Manipulator
- Manipulator für Türgriffe
- Nerf Bewaffnung
- Autonomes Fahren um Werkzeuge und Marte von Raum zu Raum zu transportieren.
[gihub.com | https://github.com/hackffm/SpaceShuttle/]
Raspi Config
install python 3.7 or greater. https://github.com/instabot-py/instabot.py/wiki/Installing-Python-3.7-on-Raspberry-Pi
mjpg-streamer installation
- Update & Install Tools
sudo apt-get update sudo apt-get upgrade -y sudo apt-get install build-essential libjpeg8-dev imagemagick libv4l-dev cmake -y
- Clone Repo in /tmp
cd /tmp git clone https://github.com/jacksonliam/mjpg-streamer.git cd mjpg-streamer/mjpg-streamer-experimental
- Make
make sudo make install
- UV4L
curl http://www.linux-projects.org/listing/uv4l_repo/lpkey.asc | sudo apt-key add -
echo "deb http://www.linux-projects.org/listing/uv4l_repo/raspbian/stretch stretch main" | sudo tee -a /etc/apt/sources.list
sudo apt-get update
sudo apt-get install -y uv4l uv4l-raspicam uv4l-raspicam-extras uv4l-webrtc-armv6 uv4l-raspidisp uv4l-raspidisp-extras
Movies


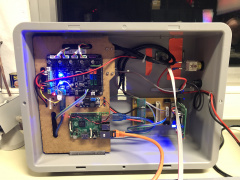
Images MK-1
- SpaceShuttle










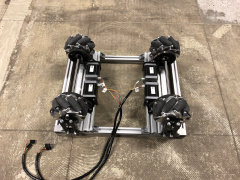
Undercarriage
- SpaceShuttle



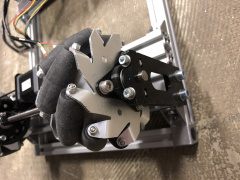







Images MK-2
- SpaceShuttle





BOM
Drive stack
Elektronik Teile
- 1x Makerbase MKS GEN L 1.0
- 4x Pololu DRV8825 Stepper Motor Driver Carrier, High Current
- 1x Raspberry PI 2
- 1x DC/DC Step-Down to 5V for Raspberry PI
Undercarriage
- 2x Aluminumprofil 20x20 B-type 265mm
- 2x Aluminumprofil 20x20 B-type 365mm
- 4x Aluminumprofil 20x40 B-type 305mm
- 4x Cube connector 20 B-type
- 8x Bracket 20x20 B-type
- Div schrauben und Muttern Aluminiumprofil
- 4x Nexusrobot 100mm Mechanum Räder
- 8x Kugellager für 8mm Achse
- 2x 8mm nicht rostfreie Achse
Power stack
- 2x 12v Bleigel Akkus seriell verbunden um auf 24V zu kommen
Vision stack
- 1x Weitwinkel Raspberry PI Kamera
- 1x Raspberry PI 3