Space Robot Experimental aka SpaceREx: Unterschied zwischen den Versionen
(→Schnittstellen) |
(→Space Robot Experimental aka SpaceREx) |
||
| Zeile 1: | Zeile 1: | ||
== Space Robot Experimental aka SpaceREx == | == Space Robot Experimental aka SpaceREx == | ||
| + | Dieses Projekt soll das Wissen seine Mitglieder für eine allgemeine Roboterplattform bündeln. | ||
| + | Mitglieder: | ||
| + | [[Benutzer:Strange|Strange]] | ||
| + | |||
| + | Einige Dinge sind gesetzt:<br> | ||
| + | ROS, Python, [https://en.wikipedia.org/wiki/Differential_wheeled_robot Differialantrieb]<br> | ||
| + | Raspberry Pi | ||
== Videostreaming == | == Videostreaming == | ||
Version vom 28. Juli 2017, 12:51 Uhr
Inhaltsverzeichnis
[Verbergen]Space Robot Experimental aka SpaceREx
Dieses Projekt soll das Wissen seine Mitglieder für eine allgemeine Roboterplattform bündeln.
Mitglieder: Strange
Einige Dinge sind gesetzt:
ROS, Python, Differialantrieb
Raspberry Pi
Videostreaming
Eine Übersicht einiger Videostreamingmöglichkeiten für den Raspberry. [1]
UV4L
Beispiel mit gesichtserkennung [2]
Hier wird gezeigt wie man sich die Bibliothek installiert
[3]
Zum Verwenden die Auflösung und Qualität konfigurieren.
Um den mjpeg Stream in eine Webseite einzubinden einfach
<img id="video" src="http://raspberrypi:8080/stream/video.mjpeg" width="640" height="480">
einfügen.
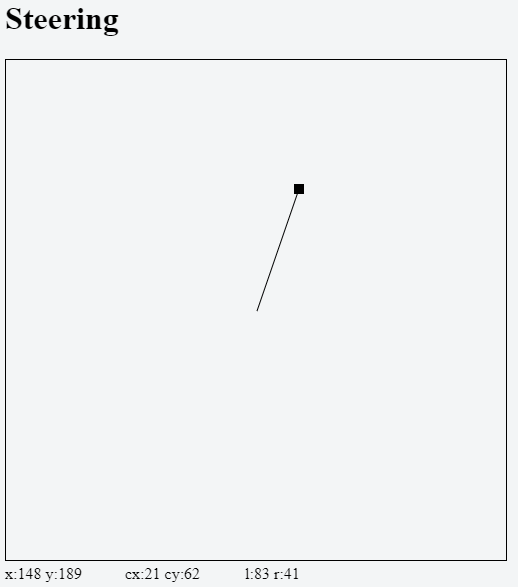
Steuerung
Hier ein JSFiddel der Zeigt wie man aus Koordinaten eines kartesischen Koordinatensystems eine Ansteuerung für zwei Räder berechnen kann.
1. Der Ursprung ist unten links. x und y der Punkt.
2. Danach ist der Ursprung in die Mitte versetzt cx und cy.
3. Zum Schluss in die Ansteuerung für das linke l und rechte r Rad umgerechnet.
Schnittstellen
Raspberry und Arduino
Raspberry und WebSite
WebSockets
Am besten mit Python oder node.js