Drawbot@MfK: Unterschied zwischen den Versionen
Axl (Diskussion | Beiträge) K (→Bots: + Links) |
Axl (Diskussion | Beiträge) |
||
| Zeile 1: | Zeile 1: | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
[[Datei:Drawbot Funktionsprinzip.png|320px|right|thumb|Drawbot Funktionsprinzip]] | [[Datei:Drawbot Funktionsprinzip.png|320px|right|thumb|Drawbot Funktionsprinzip]] | ||
= Das Projekt = | = Das Projekt = | ||
| Zeile 68: | Zeile 54: | ||
* Gondel: Kunststoff-Ringe<br/>[[Datei:BaumarktBot IMAG0992.jpg|80px]] [[Datei:BaumarktBot IMAG0994.jpg|80px]] [[Datei:BaumarktBot IMAG0998.jpg|80px]] [[Datei:BaumarktBot IMAG0995.jpg|80px]] [[Datei:BaumarktBot IMAG1005.jpg|80px]] [[Datei:BaumarktBot IMAG1028.jpg|80px]] [[Datei:BaumarktBot IMAG1032.jpg|80px]] | * Gondel: Kunststoff-Ringe<br/>[[Datei:BaumarktBot IMAG0992.jpg|80px]] [[Datei:BaumarktBot IMAG0994.jpg|80px]] [[Datei:BaumarktBot IMAG0998.jpg|80px]] [[Datei:BaumarktBot IMAG0995.jpg|80px]] [[Datei:BaumarktBot IMAG1005.jpg|80px]] [[Datei:BaumarktBot IMAG1028.jpg|80px]] [[Datei:BaumarktBot IMAG1032.jpg|80px]] | ||
|} | |} | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
= Aufbau = | = Aufbau = | ||
Version vom 14. September 2013, 12:48 Uhr

Inhaltsverzeichnis
[Verbergen]Das Projekt
Ziele
- Vorbild ist das Projekt Der Kritzler
- Aufbau eines/mehrerer Drawbots, die direkt auf ebene Flächen zeichnen können.
- Start: Sofort, 6. September 2011
- Ziel: Vorführung am 9. Oktober 2011 im Museum für Kommunikation Frankfurt am Main als Teil der Projekte für's MfK
- Flyer zum Drawbot in der Ausstellung: Datei:Plakat Drawbot.pdf (09.10.2011)
Teilnehmer
Bots
Über die Jahre sind einige Bots entstanden:

|
Prototyp #1 September 2011 |
Der Ur-Bot als reine Studie aus allem was gerade rumflog. Unter anderem wurde die Firmware auf die Nutzung von uni-polaren Steppern angepaßt, die Snow beigesteuert hat.
|
|---|---|---|

|
Prototyp #2 Oktober 2011 |
Robuster Aufbau mit dem Ziel, möglichst keine Komponenten dazuzukaufen. Grundaufbau an einem Flipchart (Danke Snow) innerhalb von 5 Wochen um einen vorführbaren Bot im Museum für Kommunikation Frankfurt am Main zu zeigen. An diesem Bot wurde der Hauptteil der Software entwickelt sowie diverse Optimierung an der Hardware verprobt. Er steht heute (2013) noch im Space und wird hin und wieder re-aktiviert.
|

|
Window-Bot Oktober 2011 |
TBD
|

|
Alu-Bot 2012/2013 |
TBD
|

|
Baumarkt-Bot 2013 |
Mit diesem Bot setzen wir auf möglichst einfach zu beschaffende Komponenten für den Rahmen und die Gondel.
Ideal wäre die komplette Beschaffung aus einem Baumarkt.
|
Aufbau
Teile-Liste, Lieferanten und Kosten
- Steuer-PC
- Arduino
- 2 Stepper
- Stepper driver
- A4988 Stepper Motor Driver Carrier von Pololu bzw. equivalente Platine über ebay
- Servo-Motor
- ...
Eingesetzte Teile (vorläufig)
| Teil | Anzahl | Beschreibung | Lieferant | Artikelnummer | Preis/Einheit | Versand | Gesamt |
|---|---|---|---|---|---|---|---|
| Saugnapf | 2 | Saugnapfhalter Glasheber Glas-Gummi-Sauger 40kg Alu | ACE Technik | 706750 | 4,99 € | 6,99 € | 16,97 € |
| Schrittmotor | 2 | Schrittmotor MOONS 14HY7002-06 (bipolar, 1,8°, 5mm Achse) | Pollin | 310446 | 4,95 € | 4,85 € | 14,75 € |
| Zahnriemen | 6 m | Zahnriemen PU Profil T5 10 mm Breite offen (endlich) | Zahnriemen24 | 330000 | 5,50 € | 0,00 € | 33,00 € |
| Zahnriemenrad | 2 | Zahnriemenrad Aluminium T5 10 Zähne 15 mm Riemen 4 mm Bohrung | Zahnriemen24 | 410911 | 8,00 € | 0,00 € | 16,00 € |
| Kugellager | 8 | Kugellager 626ZZ, 6/19/6mm | Pollin | 94-440 431 | 0,50 € | inkl. | 4,00 € |
| Servo | 1 | Modelcraft Mini-Servo WG-90MG einfach kugelgelagert Metallgetriebe JR | Conrad (Shop) | 209088-62 | 9,95 € | - | 9,95 € |
| Motor-Treiber | 1 | ULN2803A, 8-Kanal Darlington-Treiber, DIP18 | Pollin | 94-101 063 | 0,35 € | inkl. | 0,35 € |
| Gondel | 1 | diverse Aluminium-Profile | Baumarkt | ? | ca. 10,00 € | - | ca. 10,00 € |
| Sonstiges | 1 | Kleinteile (Schrauben, Muttern, Stifte, usw.) | Baumarkt | ? | ca. 20,00 € | - | ca. 20,00 € |
TOTAL: ca. > 125 €
Der original Kritzler verwendet optisch ansprechendere Teile, ist dafür aber deutlich teurer:
| Teil | Anzahl | Beschreibung | Lieferant | Artikelnummer | Preis/Einheit | Versand | Gesamt |
|---|---|---|---|---|---|---|---|
| Saugnapf | 2 | Saugereinheit | Esska | 90BO63311 | 21,75 € | ? | 43,50 € |
| Schrittmotor | 2 | Schrittmotor NEMA 17 (bipolar, 1,8° Schrittwinkel, 5mm Achse) | Reichelt | QSH4218-35-026 | 23,60 € | ? | 47,20 € |
| Zahnriemen | 6 m | Zahnriemen PU Profil T2,5 6 mm Breite Meterware | Mädler | 16060000 | 18,53 € | ? | 111,18 € |
| Zahnriemenrad | 2 | Zahnriemenrad Azetalharz T2,5 22 Zähne 6 mm Riemen 4 mm Bohrung | Mädler | 16052200 | 2,92 € | ? | 5,84 € |
| Kugellager | 4 | Rillenkugellager einreihig 5 mm Bohrung | Mädler | 625-ZZ-SBC | 3,52 € | ? | 14,08 € |
| Servo | 1 | Bestand | ? | ? | ? | ? | ? |
| Motor-Treiber | 2 | A4983 Stepper Motor Driver Carrier | Pololu | 1201 | 12.95 $ | ? | 12.95 $ |
| Gondel | 1 | MDF, 5 mm, laser-geschnitten | Formulor | ? | ca. 20,00 € | ? | ca. 20,00 € |
| Sonstiges | 1 | Kleinteile (Schrauben, Muttern, Stifte, usw.) | ? | ? | ca. 20,00 € | - | ca. 20,00 € |
TOTAL: ca. > 290 €
Prototypen
September 2011
Firmware - Modifications
- Modifikation der Kritzler Firmware
- Anpassungen der Geometrie
- Betrieb von uni- statt bi-polaren Schrittmotoren - Typ PM55L-048-XXXX (Danke, Snow) und Treiber-IC ULN2803A
- 96 Halbschritte
- additional commands
- home (H)
- stepper delay is adjustable (command D delay_move delay_line)
- # comment ... to ignore rest of line
- Pen up / pen down with ramp - smother control of the servo
- Antrieb mangels Zahnriemen mit einem Faden
- Prototyp mit Fischertechnik © Bauteilen
- Motor-Abstand 50 cm
Drawbot Prototyp Galerie

Stepper-Driver ULN2803A

Setup #001

Test-Motiv

Mehr Tests

Setup #002

Test mit Fonts

Stern

Logo

Gondel 2.0

UV-aktiver Stift

Finales Setup für's MfK

LED-Circle verdeutlicht Steps

Holz ersetzt Tape










Software
- github Quelltext und Beispiele des Kritzler Projekts
Firmware - Commands
| Command | Function | Comment |
|---|---|---|
| m X Y | move relative | values X and Y in millimeters |
| M X Y | move absolute | |
| l X Y | line relative | move with pen down |
| L X Y | line absolute | |
| D md ld | set delays** | set stepper delays for move (md) and line (ld) in milliseconds default 20 50, typically 10 - 150 ms, range 1 ... 255 |
| P md ld | set pen up and down** | set servo positions for the pen default 50 100, typically 10 - 150 ms, range 1 ... 255 |
| H | move home** | move to origin position (0/0 mm) |
| i | identify** | returns "#ID: id width x-origin y-origin pulley_radius" on serial line to identify the DrawBot id - reflects the jumper settings of pins A0/A1/A2 [0 ...7] width - distance of the two stepper motors |
| # comment ... | comment** | rest of line, up to the next character 13 (carriage return), will be ignored comment is echo'ed to the serial line |
** Commands were not included in the original Kritzler Firmware
Offene Themen
- Aufbau mit größerem Abstand der Motoren
- Ausgleich der Verzerrungen (eigentlich ja ganz cool, system-immanente Fluchtpunkt-Perspektive)
- Probleme mit Y-Koordinaten < 0, führt zum Stopp und Vorzeichen-Wechsel der Y-Achse
- Mechanik der Gondel
- Stift
Window-Drawbot
- Motoren: NEMA14 ?
- Anschluß Pololu Treiber, Breadboard

Window-Setup mit Breadboard

Window-Setup, Gondel

Anschluß Pololu Treiber, Breadboard

Anschluß Pololu Treiber, Pins

Details Motorbefestigung 1

Details Motorbefestigung 2





Whiteboard Drawbot V4
Besuch im RaumZeitLabor Mannheim
14.04.2013 - HackFFM besucht die LHC4 im RaumZeitLabor Mannheim.
Der Drawbot war quasi nonstop im Betrieb an der Tafel und im Fenster des Hackerspace :-). Unter anderem wurde bei der Gelegenheit auch ein Poster mit Hinweis auf die FUxCON erstellt und gleich am Eingang des Space aufgehängt. Einige Member kamen mit Kundenwünschen im SVG-Format auf uns zu, die wir live auf DIN A1 Papier erfüllt und ge-draw-t haben.





Wunschprogramm der Mannheimer

Wunschprogramm der Mannheimer

FUxCON Poster

FUxCON Poster - hängt







Konfiguration
<?xml version="1.0"?> <drawbot> <bot_0> <default> <cfg id="name">Jochen's Tafel-Drawbot</cfg> <cfg id="canvas" Xmin="-220" Xmax="+220" Ymin="-280" Ymax="+280">DIN A3 minimal border</cfg> <cfg id="speed" move_delay="15" line_delay="20" move_ff_delay="5">Whiteboard</cfg> <cfg id="geometry" deskew="0"></cfg> </default> </bot_0> </drawbot>
Setup für The Ultimate TicTacToe Challenge
29.03.2013

Aufbau 29.03.2013

Lager mit Stepper

Gondel

Elektronik in a box

Tests vor Einmessen

Tests vor Einmessen

TicTacToe
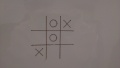
TicTacToe Tests 1

TicTacToe Tests 2

Kalibration

FUxCON Logo

Dauertest mit AT-AT (~70 min.)












Setup Feb. 2012

Baumarkt-Bot V5 2013
Mit diesem Bot setzen wir auf möglichst einfach zu beschaffende Komponenten für den Rahmen und die Gondel.
Ideal wäre die komplette Beschaffung aus einem Baumarkt.
- Rahmen: Alu-Profile und DIN A3 Whiteboard-Tafel
- Antrieb: Bi-polare NEMA17 Motoren mit Perlenschnur für Jalousie-Antriebe
- Gondel: Kunststoff-Ringe und Metallband

Jalousie-Antrieb

Kunststoff-Ringe

... bohren ...

für die Gondel



Gondel-Test

Servo-Halterung ...

aus Metallband ...

und Führung für ...

Abstoß-Draht

Geht!











Ideen für die Vorführung
- Etwas zeichnen?
- Interaktiv, spontan oder vorbereitet?
hexlab - hexagonal_labyrinth_generator

- Quelle: http://www.local-guru.net/processing/hexlab/ basiert auf Algorithmen von http://ruby-lang.org.ru/post/1675.html
- zufälliger Aufbau und veränderbare Größe und Komplexität
- Public domain Lizenz-Info aus dem Quellcode:
# License? What license? We don't need no stinkin' license.
# This code is in the public domain. Knock yourself out. Use it however
# you want. Please prefer good over evil.
Hershey Vector Fonts

- Quelle: http://paulbourke.net/dataformats/hershey/
- skalier- und drehbar
- Public domain: It is sometimes necessary to have a simple set of characters made up of vectors, the Hershey set of vectors is one of the standard descriptions in the public domain. They were originally created by Dr. A. V. Hershey while working at the U. S. National Bureau of Standards.

Binärbaum

- Open source: Eigener Code / quelloffen
- Diverse Parameter: Stammdurchmesser, Winkel, Iterationen, maximale & minimale Ast-Länge
- Die Parameter werden auf optional mit Zufallsfaktoren multipliziert für asymetrische, natürlicher aussehende Variationen


Drawbot Trace Zeichensatz
- Open source: Zeichensatz in Eigenentwicklung, speziell für die Nutzung im Drawbot
- Definition der Kontur jedes Zeichens, es werden nur Winkel im 45° Raster und ganzzahlige Schrittweiten benutzt.
- Proportional-Schrift, variable Weite jedes Buchstabens

HPGL Dateien (aus SVG konvertiert)
- Eigenentwicklung
- Konvertierung SVG nach HPGL über Inkscape
- Import-Routine in MfK Kiosk
- Unterstützung der Befehle PU (pen up) und PD (pen down) in HPGL
- Beispiele: SVG Gürteltier (Armardillo)
- Open Hardware Logo

![]()

HPGL "Ausdruck" aus Eagle PCB
- Drawbot goes Buntich: Tut hatte die Idee, eine Schaltung für das Buntich Projekt auszudrucken.
- Die Eagle PCB Software kann direkt HPGL ausgeben.
- Die Datei musste noch per Text-Editor nachbearbeitet werden, wurde dann aber erfolgreich auf DIN A3 Papier ausgedruckt (ca. 1:10h).
- Der farbige Ausdruck entstand mit manuellem Stift-Wechsel.


Platonische Körper, z.B. Dodekaeder
- Plotten der Vorlage für den Bau eines Dodekaeders
- incl. Klebelaschen zum einfachen Nachbasteln
- die 12 Seiten sind mit je einem Buchstaben customized möglich

Hackerspace Schilder über Inkscape
- Schilder für die Schränke, made by Inkscape and Drawbot
- u.a. "Projects" mit dem Zahnrad aus der Wikipedia (SVG)
- Font: Rockwell Extra Bold


UniBot Combo-Platine
- Eine Euro-Platine für
- Arduino
- USB2Serial Anschlüsse für Arduino Mini Adapter und Guido-ino Port
- Treiber für unipolare Stepper (ULN...)
- Servo-Anschlüsse
- bot_ID Jumperfeld
- Pin 13 LED (Blink :-)
- Aufbau auf Streifenraster-Platine
- Layout erstellt mit mit Lochmaster
- UniBot Combo-Platine
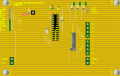
Layout

Platine aufgebaut

Platine eingebaut

Setup für Tests



{kind=link}
Links
- Ausstellung "Do It Yourself: Die Mitmach-Revolution" des Museums für Kommunikation Frankfurt am Main.
- Vorbild ist das Projekt Der Kritzler
Blog & Press
Weitere Drawbots
- Raspberry Pi driven Polargraph exhibits high precision drawing ability
- Drawbot
- AS220
- Polargraph
- Colossal - Custom Polargraph Drawings
- Polargraph Gondola by JohnA - Gondel aus dem 3D Drucker in Thingiverse und Beispiel-Bilder
- Eske Rex’s Pendulum-Powered Drawing Machine
- Drawbot with g-Code control
@Kickstarter
Weitere DIY-Plotter
- Interlock - BarCamp Plot-chester
- Interactive Robotic Painting Machine by artist and composer Benjamin Grosser
- MachineDrawing DrawingMachines
- Maschinenraum: Articulated plotting robot for €10 (2 Arme mit Servos)
- New Drawing Machine from Resonance Studio Workshop (2 Arme und kreisförmige, rotierende Leinwand)