Arucomover: Unterschied zwischen den Versionen
Snow (Diskussion | Beiträge) |
Snow (Diskussion | Beiträge) |
||
| Zeile 6: | Zeile 6: | ||
Ein Python Script benutzt die OpenCV Library um Arucos im Bild mit Position und Entfernung zu erkennen. | Ein Python Script benutzt die OpenCV Library um Arucos im Bild mit Position und Entfernung zu erkennen. | ||
| − | Der Videostream und die Position | + | Der Videostream und die Position mit Entfernung werden von dem Script zur Verfügung gestellt. |
| − | Ein Node-Red Flow Nimmt die Position auf und gibt | + | Ein Node-Red Flow Nimmt die Position auf und gibt Steurbefehle über an einen ItsyBitsy M3, der damit ein MotorShield steuert. |
| − | Angeschlossen aber nicht benutzt ist ein BNO055, der | + | Angeschlossen aber nicht benutzt ist ein BNO055, der Sensordaten Liefert um z.B. die Positionsbestimmung zu verbessern. |
Hier eine Übersicht | Hier eine Übersicht | ||
Version vom 1. Juli 2021, 12:06 Uhr
Inhaltsverzeichnis
Ziel
Ein kleiner Robot auf Basis eines Raspberry Pi soll selbstständig Aruco codes finden und anfahren können
Konzept
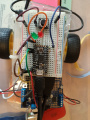
Ein Python Script benutzt die OpenCV Library um Arucos im Bild mit Position und Entfernung zu erkennen. Der Videostream und die Position mit Entfernung werden von dem Script zur Verfügung gestellt.
Ein Node-Red Flow Nimmt die Position auf und gibt Steurbefehle über an einen ItsyBitsy M3, der damit ein MotorShield steuert.
Angeschlossen aber nicht benutzt ist ein BNO055, der Sensordaten Liefert um z.B. die Positionsbestimmung zu verbessern.
Hier eine Übersicht

Hier ein Schaltplan dazu

Es soll aber trotzdem möglich sein, daß ein Benutzer eingreift,dafür die UI aus Node-Red heraus

Fortschritte
Erste Ergebnisse
- Stepps
Start

Stepp 2

Stepp 4

Final Hardware




BOM
Raspberry Pi 3 BNO055 MotorAeshield V2