Space Robot Experimental aka SpaceREx: Unterschied zwischen den Versionen
(→Videostreaming) |
|||
| Zeile 3: | Zeile 3: | ||
== Videostreaming == | == Videostreaming == | ||
| + | Eine Übersicht einiger Videostreamingmöglichkeiten für den Raspberry. | ||
| + | [http://reefwingrobotics.blogspot.de/2017/03/streaming-video-from-raspberry-pi-camera.html] | ||
| + | |||
== UV4L == | == UV4L == | ||
Beispiel mit gesichtserkennung [https://www.linux-projects.org/uv4l/tutorials/custom-webapp-with-face-detection/]<br> | Beispiel mit gesichtserkennung [https://www.linux-projects.org/uv4l/tutorials/custom-webapp-with-face-detection/]<br> | ||
Version vom 25. Juli 2017, 15:57 Uhr
Inhaltsverzeichnis
Space Robot Experimental aka SpaceREx
Videostreaming
Eine Übersicht einiger Videostreamingmöglichkeiten für den Raspberry. [1]
UV4L
Beispiel mit gesichtserkennung [2]
Hier wird gezeigt wie man sich die Bibliothek installiert
[3]
Zum Verwenden die Auflösung und Qualität konfigurieren.
Um den mjpeg Stream in eine Webseite einzubinden einfach
<img id="video" src="http://raspberrypi:8080/stream/video.mjpeg" width="640" height="480">
einfügen.
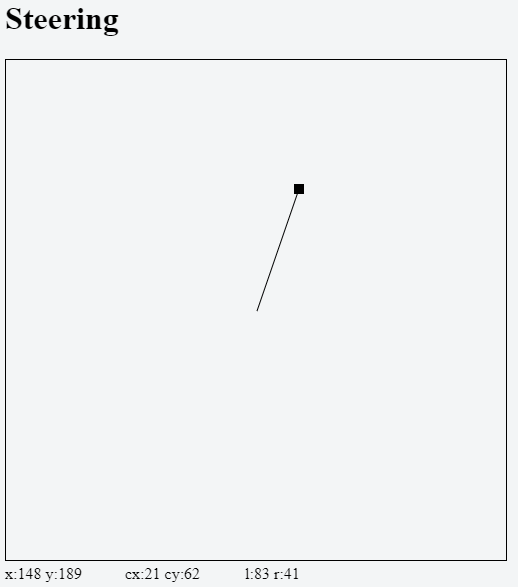
Steuerung
Hier ein JSFiddel der Zeigt wie man aus Koordinaten eines kartesischen Koordinatensystems eine Ansteuerung für zwei Räder berechnen kann.
1. Der Ursprung ist unten links. x und y der Punkt.
2. Danach ist der Ursprung in die Mitte versetzt cx und cy.
3. Zum Schluss in die Ansteuerung für das linke l und rechte r Rad umgerechnet.
Schnittstellen
Raspberry und Arduino
Raspberry und WebSite
WebSockets
Am besten mit Python oder node.js