Spider UFO: Unterschied zwischen den Versionen
Aus Hackerspace Ffm
Axl (Diskussion | Beiträge) (→Versuchsaufbau aus Fischer Technik) |
Axl (Diskussion | Beiträge) |
||
| (2 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 28: | Zeile 28: | ||
Screenshot: | Screenshot: | ||
| − | [[Datei:Spider UFO simulator 003.png| | + | [[Datei:Spider UFO simulator 003.png|240px]] |
Movie: [[Datei:Spider UFO.wmv]] | Movie: [[Datei:Spider UFO.wmv]] | ||
| Zeile 44: | Zeile 44: | ||
</gallery> | </gallery> | ||
| − | + | ||
| + | <span style="font-size:3em;">🎥</span> Testlauf [[Datei:20170122 171617.mp4]] | ||
| + | |||
| + | |||
| + | === CNC Shield === | ||
| + | Um neben X, Y und Z auch den A Stepper unabhängig anzusteuern müssen 2 Jumper auf dem CNC Shield gesetzt werden: | ||
| + | * D12 --> A Step | ||
| + | * D13 --> A Dir | ||
| + | |||
| + | siehe im Bild, links über der Stromversorgung: [[Datei:CNC Shield Jumper Half-Stepping.jpg|120px]] | ||
| + | |||
| + | |||
| + | == Versuchsaufbau mit echten Größenverhältnissen == | ||
| + | ''2017-02-18'' | ||
| + | |||
| + | [[Datei:Spider UFO - Blockdiagramm.odg - LibreOffice Draw.png|240px|border]] | ||
| + | |||
| + | * Arbeitsraum ca. 4 x 6 x 2 m³ | ||
| + | * Verbindung zu den vier Ecken über RS485 | ||
| + | * 3D-gedruckte Aufwicklung, Durchmesser 30mm | ||
| + | * 1 mm Stahlseil | ||
| + | * 5A Stepper Treiber für NEMA 17 | ||
| + | * Datenübertragung per RS-485 über CAT5 Kabel | ||
| + | |||
| + | <gallery widths=240px perrow=3> | ||
| + | Datei:20170218 154642.jpg|Aufwicklung | ||
| + | Datei:20170218 154657.jpg|Setup | ||
| + | Datei:20170218 140252.jpg|Module für die Datenübertragung | ||
| + | Datei:20170218 190505.jpg|Stepper-Treiber für NEMA 17 | ||
| + | Datei:20170218 211820.jpg|UFO Dummy | ||
| + | </gallery> | ||
Aktuelle Version vom 19. Februar 2017, 15:54 Uhr
Inhaltsverzeichnis
Physical setup & coordinate system
Node 3 --------------------- 0 --------------------- Node 2
| | |
| |
frame_dy | |
| |
| | |
0 - - - - - - - - - - - - * 0/0/0 - - - - - - - - - 0
| | |
| |
frame_dy | |
| |
| | |
Node 0 ----- frame_dx ------ 0 ----- frame_dx ------ Node 1
// frame dimensions, x and y are doubled, 0 is the frame center // z represents the height, positive up. 0 is x/y plane
Simulation
with Processing 3.xx
Screenshot:

Movie: Datei:Spider UFO.wmv
Versuchsaufbau aus Fischer Technik
2017-01-14 - 2017-01-22

Aufbau 1
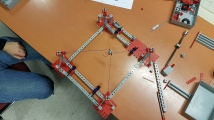
Top
Arduino Uno CNC Shield für 4 Pololu's
Stepper-Platte für Fischertechnik

Einbau Stepper





🎥 Testlauf Datei:20170122 171617.mp4
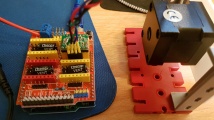
CNC Shield
Um neben X, Y und Z auch den A Stepper unabhängig anzusteuern müssen 2 Jumper auf dem CNC Shield gesetzt werden:
- D12 --> A Step
- D13 --> A Dir
siehe im Bild, links über der Stromversorgung: 
Versuchsaufbau mit echten Größenverhältnissen
2017-02-18

- Arbeitsraum ca. 4 x 6 x 2 m³
- Verbindung zu den vier Ecken über RS485
- 3D-gedruckte Aufwicklung, Durchmesser 30mm
- 1 mm Stahlseil
- 5A Stepper Treiber für NEMA 17
- Datenübertragung per RS-485 über CAT5 Kabel

Aufwicklung

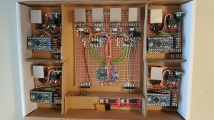
Setup
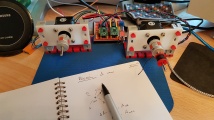
Module für die Datenübertragung

Stepper-Treiber für NEMA 17

UFO Dummy




